Despite the potential of reinforcement learning (RL) for building general-purpose robotic systems, training RL agents to solve robotics tasks still remains challenging due to the difficulty of exploration in purely continuous action spaces. Addressing this problem is an active area of research with the majority of focus on improving RL methods via better optimization or more efficient exploration. An alternate but important component to consider improving is the interface of the RL algorithm with the robot. In this work, we manually specify a library of robot action primitives (RAPS), parameterized with arguments that are learned by an RL policy. These parameterized primitives are expressive, simple to implement, enable efficient exploration and can be transferred across robots, tasks and environments. We perform a thorough empirical study across challenging tasks in three distinct domains with image input and a sparse terminal reward. We find that our simple change to the action interface substantially improves both the learning efficiency and task performance irrespective of the underlying RL algorithm, significantly outperforming prior methods which learn skills from offline expert data.
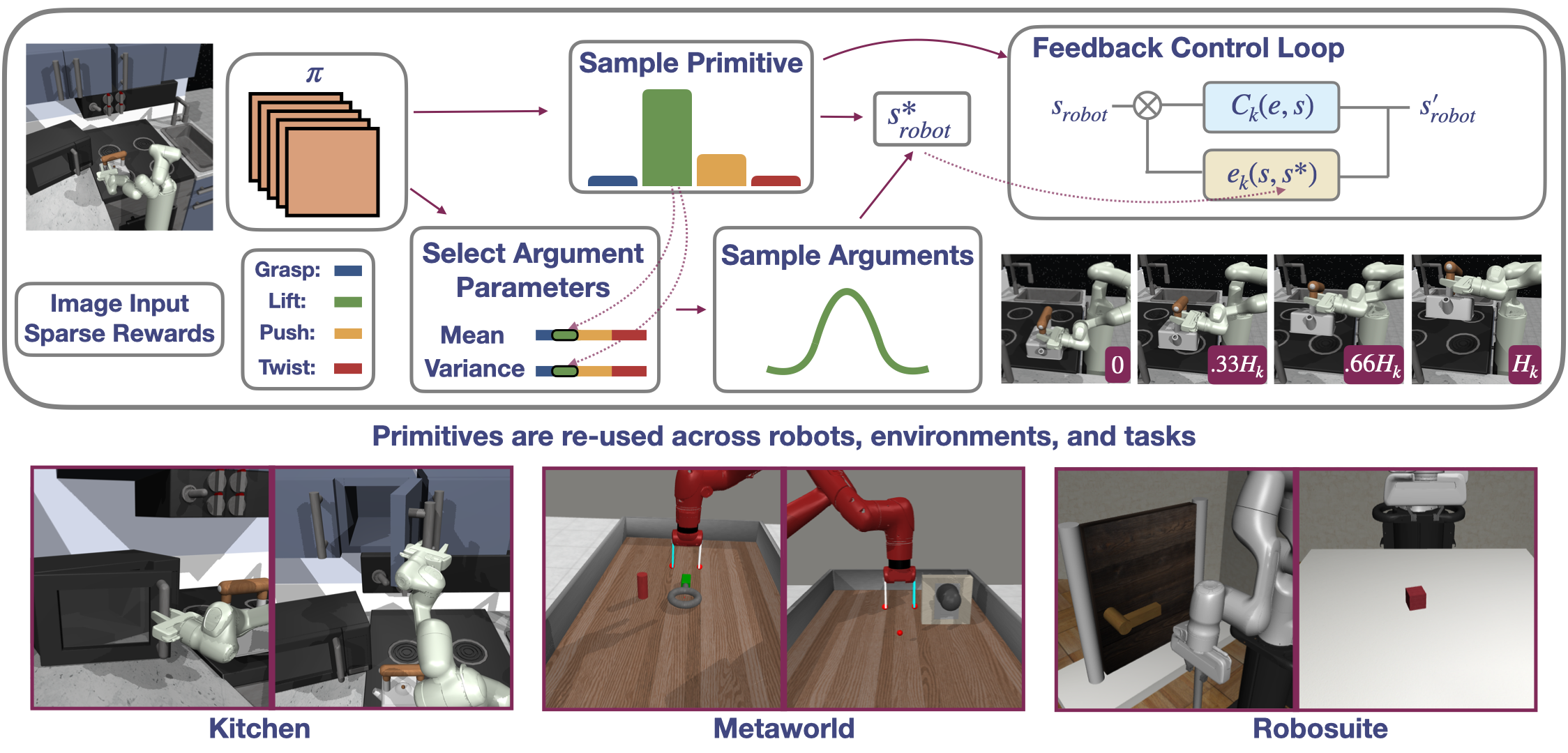
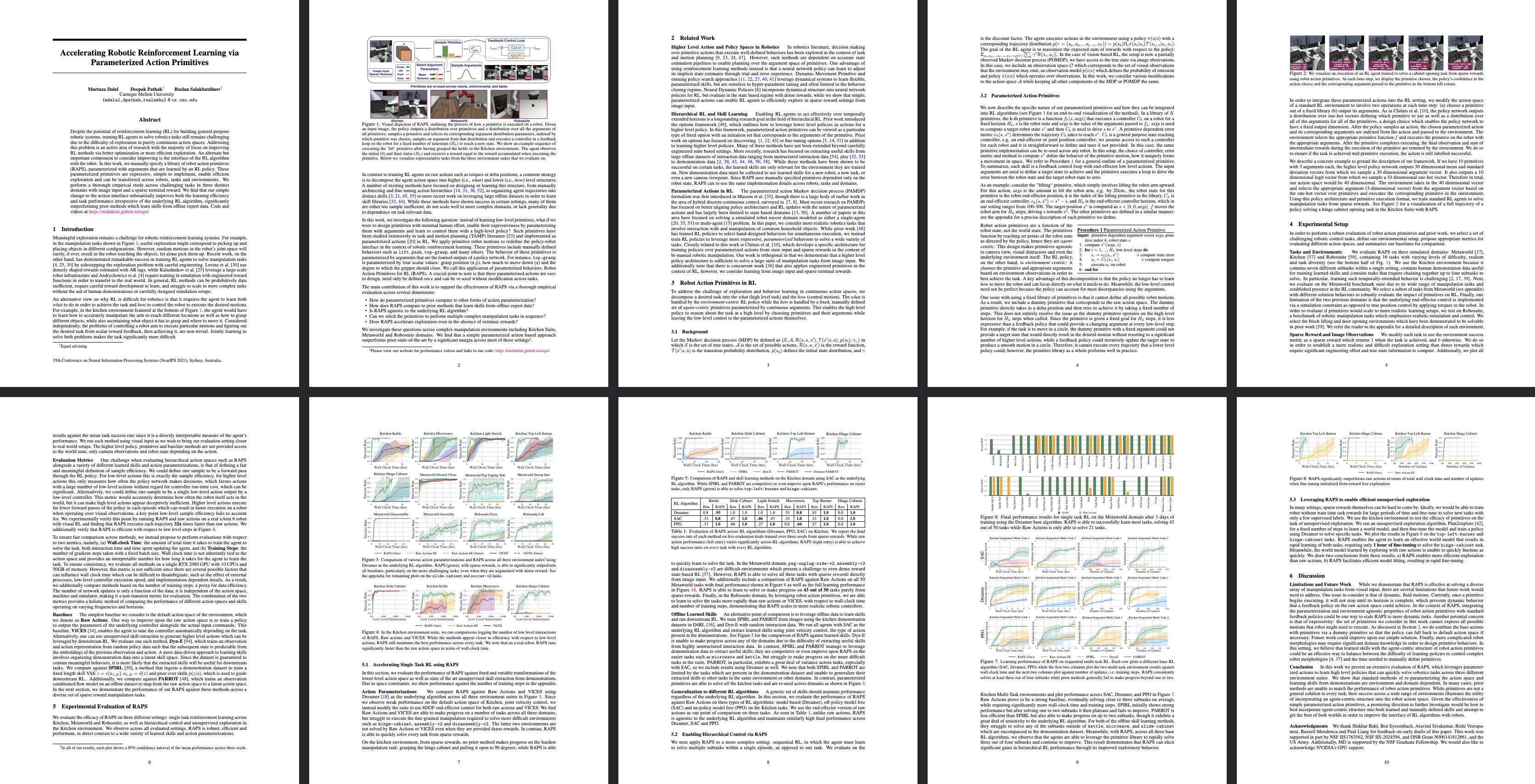
Robot Action Primitives (RAPS)
A simple redefinition of an RL agent's underlying action space can substantially improve performance on complex robotic control tasks.
Kitchen Evaluation
Metaworld Evaluation
Robosuite Evaluation
Source Code
Check out our implementation of RAPS across Kitchen, Metaworld and Robosuite on our Github repository.